AGRO NAVÓ Plan – Software for planning and evaluation of
the path and work of field robots
Hans
Glasmacher
ABSTRACT
There are
several reasons for a detailed planning of the driving route and the implement
tasks for partially or totally autonomous field robots, especially when high
accuracy or complex jobs are demanded, or new robot-like tractors (e.g. without
a driver seat or steering wheel) will be developed. But also the reduction of
necessary machine working time in the field by an optimal preparation in the
office is a goal, especially when repeatedly used for time critical work.
The planning
software AGRO NAV Plan starts with surveyed field boundaries and obstacle
polygons. After selection of a vehicle and implements the user continues with
the definition of treatment zones, working direction, driving strategy, turn
lands, velocities, and so on. Manual or semi-automatic path and implement
control generation are possible. During the planning process collision control
and implement compatibility tests are executed.
All data are
stored in a database with functions to export Jobs to PC-Card, import completed
work data from a PC-Card, as well as data exchange functions to other
manufacturers software.
The
flexibility of the software allows even jobs with very special challenges to be
planned and completed by machines equipped with the AGRO NAV system for
autonomous vehicle and implement steering. Examples are presented.
KEYWORDS. Automatic steering, Autonomous working,
Agriculture, Collision control, Computer software, Electronics, Erosion
control, Field Surveying, GIS, GPS, guidance, Implement steering, Implement
control, Monitoring, Navigation, Kalman filter, Off-road vehicles, Parallel
Swathing, Planning, Precision farming, Radar, Robots, Route planning, RTK-GPS,
Site specific, Three dimensional, Topography, Tracking, Tractors, tramlining,
Weed control, Working pattern.
Introduction
AGRO NAV is
a precision navigation and control system for agricultural vehicles and
implements. To realize this accuracy and with respect to the future of robots
without manual steering, additionally a sophisticated planning software for
agricultural tasks was developed. This presentation will explain the
functionality and emphasize the benefits of this software, called AGRO NAV
Plan.
Software for planning and
evaluation of path and work of field robots
Description of the
complete AGRO NAV system
AGRO NAV is
a self-contained high precision vehicle-based navigation and control system,
consisting of several elements inside and outside of the vehicle. The first
visible is the AGRO NAV Navigation Computer GT 2000, which runs the User
Interface and the complete navigation software package, and is in principle a
ruggedised Pentium PC. The navigation hardware components are a RTK-GPS
receiver with UHF data radio, fibre gyro, tilt sensors, and a radar speed
sensor. The vehicle has to be prepared for steering, speed and hydraulic system
control by wire to communicate with the navigation software. In general, this
is realized via a CAN bus by a job controller, to interface the signals between
the main Navigation Computer and the vehicle’s electronic and hydraulic
systems, together with vehicle specific software (Freimann 2000/2).
The
real-time navigation software AGRO NAV Drive consists of the components: Man
Machine Interface with the process control module, the navigation software with
an integrated Kalman filter, the steering module and implement control module.
The software supports user functions such as surveying new fields for the job
planning process, learning a job by doing, selecting a prepared job out of a
set for execution, guiding the driver to the starting or interruption point,
and visualization and control during the job.
AGRO NAV is
designed for high accuracy demands. Though the accuracy is partly dependent on
the sensors and actuators of the vehicle, it is in general better than +/- 10
cm. At low speed on flat ground about +/- 2-3 cm are typical, and the repeat
accuracy is even better (Freimann 2000/1).
One difference
of AGRO NAV to all other known approaches to automatic driving of vehicles is
the complete and detailed pre planning of the work to be done. The explanation
of the planning process and of its advantages will be the main subject of this
manuscript. To clarify this process, the sequential steps to complete one
planning pass will be described.
Advantages and
Disadvantages of Job Planning
To start
with, the advantages and disadvantages will be presented, as GEO TEC is the
only company to use planning. I will only state the arguments, not discuss,
rate and assess them.
The main
disadvantage is, that some work at the PC must be done before going to the
field. The other disadvantages:
·
Software
learning curve.
·
The
flexibility is limited when new obstructions or restrictions have to be taken
into account, and for ad hoc decisions and modifications of jobs.
To
compensate this there are several advantages in preparing the field work in
detail in advance. The possible advantages of pre-planning jobs:
·
No
delays in field operations as a result of confusing or unclear instructions.
·
Work
with zero overlap or equally distribute the inevitable double work across all
rows.
·
Work
under low visibility conditions.
·
Avoid
damage by hidden obstacles.
·
Minimize
soil compaction by precise definition of traffic lanes or tracks with respect
to the field borders.
·
Optimise
the driving pattern with respect to corresponding working widths, restrictions
imposed by different implements, the form factor and width of fields,
topography, soil, etc.
·
Paths
and work can be repeated with the same accuracy.
·
Planning
can be done out of season thus saving time during the cropping season.
·
New
working methods can be implemented, e.g. new drive patterns with skipped loops.
·
Programming
of totally autonomous vehicles.
Description of the
planning process
The job
planning process is based on three major information sources: the field, the
vehicle and the implements. The characteristics of the last two are fixed but
field data must be determined by the farmer himself.
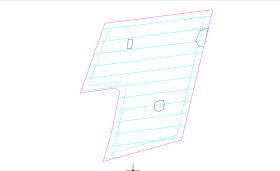
Initially,
the farmer surveys his fields with AGRO NAV Drive using the survey mode. He
selects the desired survey point of the vehicle, for example the left front
wheel, and then drives around the field. If the field has straight borders, he
may choose to mark only the edges exactly, otherwise he may drive the boundary
as accurately as possible. If there are obstacles inside or near the field,
either below and/or above the ground, they can be surveyed and categorised by
corresponding marker types. The pictures show screen-shots of a simple field
survey and another one with obstacles.

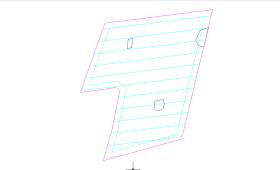
The data is
stored on a PC-Card and is later read by the AGRO NAV Plan software, where the
data are visualized. The user can now determine graphically and by the use of
rubber band lines, which corners are fixed, which lines are straight, and where
to set curves to use the land optimally, and thereby reveal errors made during
surveying. The results are closed polygons describing the field and all
obstacles. For a better perception on the screen, a bitmap of an aerial photo
or a scan of a map can be displayed and adjusted as a screen background. These
data are then saved along with additional data in the database and form the
prerequisites for the design of the future jobs.
After the
selection of a field the planning process in AGRO NAV Plan assists with the
parameterisation of the planned job by permitting a vehicle and implement
combination to be either selected or defined using the available list of
hardware drivers. The drivers contain all necessary information about
velocities, dynamics, dimensions and functional range. The user can then
determine the variable data, e.g. speed and implement functions. The screen
shot shows the selection of seeding equipment.

Parallel
help lines for the tracks can be generated easily from the field polygon as a
framework for the driving pattern. Some examples are shown in the following
screen shots:


Based on
this framework the user continues by defining treatment zones and working
direction, the definition of the turn lands, driving strategy and pattern, and
so on. Manual or semi-automatic path and implement control generation are
possible. During the planning process, the job is analysed in detail, including
collision control with obstacles as well as compatibility tests of the
implement functions. The final result is a complete and detailed program for
AGRO NAV Drive to execute.
This
program represents not only the path, but the complete work, including for
example very accurate lower and raise points of an implement as well as the
headland turns. It can be repeated as often as desired, and can, of course, be
repeatedly modified and edited by AGRO NAV Plan. All data are stored in a
database with functions to export Jobs to a PC-Card, import completed work data
from a PC-Card, as well as planned data exchange functions to other commercial
software.
When
initiating a job in the field, the prepared data is selected and loaded from
the PC-Card into AGRO NAV Drive. The driver is guided to the starting point of
the planned job and, when he has arrived, obtains permission to start the Job.
If legally permitted, he can also leave the vehicle, start it with a remote
control device and observe the work from a distance.
Examples of planned Jobs
The
following examples were executed by machines equipped with our AGRO NAV system
for autonomous vehicle steering and implement control. The software is flexible
enough to handle very special challenges like these jobs, namely:
- a) Setting asparagus
- b) Field experiments and plant
breeding
a) Setting asparagus

In this specific case of
yearly asparagus field preparation it is important to heap the dams centrally
above the plant rows, as shown below. This implies that the positions of the
plant rows can be exactly determined. In the best case, the positions are
recorded during setting, otherwise they can be surveyed afterwards using AGRO
NAV Drive.
Additionally,
in the presented example, the slope of the field had to be considered because
the parallel dams will dam up the rain water without a steady gradient, and
this will influence the temperature of the plants and later the crop yield. On
the basis of the survey data the optimal row direction was evaluated and the
gradients checked by calculation of elevation profiles.
Because
asparagus is very demanding concerning soil quality, part of the field with
lower soil quality was surveyed and excluded from planting.
The picture
shows a perspective view of the terrain and the resulting job planning.


The planned
path was a mixture of loop work, as shown on the work progress display of the
Navigation computer. In the middle of the field, a group of rows with
turnabouts was planned,  because a different kind of asparagus
was to be planted in the northern part. The planting process is shown below.
because a different kind of asparagus
was to be planted in the northern part. The planting process is shown below.
As the
tractor had to drive very slowly, at about 0.5 meter per second, it took 2 days
to plant about 30 000 square meters.
In the
following years, the same asparagus planning framework will be used to heap the
dams centrally above the plant rows or to level the dams in autumn.
b) Plant breeding
For
scientific field experiments the accurate documentation of the whole vegetation
period is of importance. The base is laid out by the so called experimental
design, which defines the patterns of the parcels and the streets in between,
the number of rows, the number and length of parcels, as well as the different
treatments of each parcel.
Especially
for seeding on a unstructured and bare field AGRO NAV is extremely helpful, as
no stake out work is necessary in advance to mark up the rows and parcels, and
the rows can be made straighter then is possible manually. Additionally, only
one man is needed to feed the sowing machine with the different kinds, no
additional driver is necessary in the field, and you can see on the photograph
that the driver’s seat is unoccupied.

In this
case not only a small lateral error for the rows is desirable, but also the longitudinal
accuracy for starting and stopping the seeding machine is of importance.

Conclusion
To achieve
high geometrical accuracy of specific agricultural field tasks, e.g. mechanical
weed control, programming of autonomous robots, preplanning of the drive path
is necessary. The software tool AGRO NAV Plan has proven to be useful for
programming the drive path and implement steering for demonstrations as well as
for actual field work. Many new possibilities exist to reduce work and cost in
the field by preplanning jobs at the PC. The aim will therefore be to simplify
the planning process without losing the flexibility to plan even special tasks.
References
1.
Sterlemann,
F.: AGRO NAV Autonomous Off-road Vehicle Navigation and Implement Control
System, using CDGPS and Inertial Backup. AgEng 2000, Proc. Int. Conf. on
Agricultural Engineering, Warwick, 02./07.07.2000. Paper 00-IE-007ii. H.1
2.
Freimann,
R.: Investigation of Position Accuracy of an Autonomous Offroad Vehicle
Navigation. AgEng 2000, Proc. Int. Conf. on Agricultural Engineering,
Warwick, 02./07.07.2000. Paper 00-IE-007ii. H.1
3.
Freimann,
R.: Autonavigation and Implement Controlled Process Automation on CAN. Proc.
Int. Symposium on Electronic Farm Communication with LBS. Nov. 20, 2000,
Hokkaido University, Sapporo. S.64/87
4.
Wit J.
S. : Vector pursuit path tracking for autonomous ground vehicles, Dissertation
at the University of Florida, August 2000
5. Simon, A and Becker, J. C. : Vehicle
Guidance for an Autonomous Vehicle, IEEE International Conference of
intelligent Transportation Systems, 1999
6. Simon, A and Becker, J. C. et al. :
A Decentralized Path Planning and Control Structure for an autonomous Vehicle, International
Conference on intelligent Vehicles, 1998