|
Die Aufgaben der Geodäsie, der Wis-
senschaft vom Ausmessen und Abbilden
der Erdoberfläche, reichen vom Erstellen
von Karten und geographischen Daten-
banken über die Katastervermessung bis
zu der Überwachung von Ingenieurbau-
werken wie Staudämmen oder den lang-
samen gegenseitigen Bewegungen der
Erdkrusten-Platten. Dem weiten Anwen-
dungsspektrum gemäß reichen die An-
forderungen an die Genauigkeit von ei-
nem Meter für geographische Informa-
tionssysteme über Zentimeter für die
Karten der Liegenschaftskataster bis zu
weniger als einem Millimeter pro Kilo-
meter beim Verfolgen von Distanzände-
rungen. Mit GPS vermag man das mit-
tels spezieller geodätischer Empfänger
und mathematisch-statistischer Auswer-
tungen zu erreichen.
Die Kennung eines GPS-Signals ist
der Trägerwelle aufmoduliert und einige
hundert Meter lang; dementsprechend
lassen sich Entfernungen aus Laufzeitun-
terschieden nur mit einer Auflösung von
einigen Metern bestimmen. Hingegen
vermessen geodätische Empfänger auch
die Trägerfrequenzen selbst, die Wellen-
längen um 20 Zentimeter haben (das Si-
gnal für zivile Anwendungen ist nur ei-
ner, das für militärische hingegen zwei
Trägerwellen unterschiedlicher Frequenz
aufgeprägt). Der Abstand zum Satelliten
ist dadurch auf weniger als einen Milli-
meter genau bestimmbar.
Dazu registrieren die Geräte die
Zahl
der Nulldurchgänge und den Phasenwin-
kel der sinusförmigen Welle (ihrer mo-
mentanen Amplitude) und korrigieren
mittels Doppier-Effekt die sich unabläs-
sig ändernde Entfernung zum Satelliten.
Wie das Geräusch eines vorbeifahrenden
Fahrzeugs scheinbar seine Frequenz än-
dert, weil sich die Tonwellenberge bei
Annäherung quasi zusammenschieben
und bei Entfernung auseinanderziehen,
mißt der Empfänger am GPS-Trägersi-
gnal pro Zeiteinheit mehr Nulldurchgän-
ge, wenn sich der Satellit ihm nähert, als
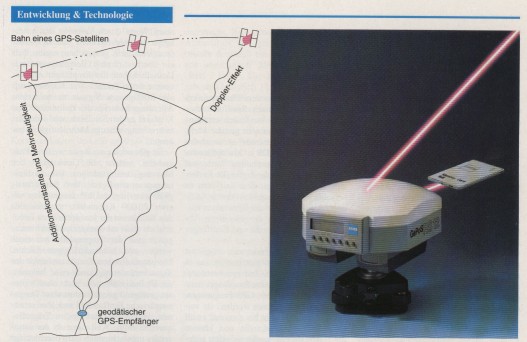
wenn er sich entfernt. Indem nun aus der
Laufzeit des Signals mit dem Standard-
verfahren eine - im Vergleich grobe -
Abschätzung der Entfernung gewonnen
wird, läßt sich anhand der bekannten
Wellenlänge ein Erwartungswert der
Nulldurchgänge bilden, die sogenannte
Additionskonstante. Die Differenz zwi-
schen ihr und der registrierten Zahl der
|
Nulldurchgänge
plus dem Phasenwinkel
entspricht den je nach Satellitenbewe-
gung weniger oder zusätzlich empfan-
genen Wellen. Diese sehr genaue Meß-
größe ist der sogenannte accumulated
doppler range (ADR). Multiplikation
ihrer regelmäßig ermittelten Werte mit
der Trägerwellenlänge ergibt die Entfer-
nungsunterschiede zu dem Satelliten zu
verschiedenen Zeitpunkten; durch Addi-
tion der Strecke, die der Konstanten ent-
spricht, erhält man die jeweiligen Ab-
stände zwischen Satellit und Empfänger
(Bild links).
Das Verfahren wendet man möglichst
mit vielen Satelliten gleichzeitig und in
einem über die GPS-Zeit synchronisier-
ten Meßtakt an. Bessere Empfänger mes-
sen zudem auf beiden GPS-Frequenzen,
die L1 und L2 genannt werden; sie ver-
fügen dazu über acht bis zweimal zwölf
parallele Empfangskanäle und können
die Daten speichern oder an einen ande-
ren Rechner weiterleiten.
Bei der Auswertung führt man die
Meßwerte von mindestens zwei gleich-
zeitig arbeitenden Empfängern zusam-
men, um die auf alle Geräte gleichartig
wirkenden Fehlereinflüsse zu eliminie-
ren (es handelt sich also um eine inter-
ferometrische Methode). Dies ist auch
das Grundprizip des differentiellen GPS
(DGPS), das jedoch ausschließlich auf
den viel gröberen Laufzeitmessungen
basiert.
Mehrdeutigkeit und Fehler
Nun
läßt sich bei der Trägerfrequenz
eine Sinuswelle von der anderen nicht
unterscheiden. Das Hauptproblem der
Berechnungen ist mithin die Mehrdeu-
tigkeit der Additionskonstanten: Da sie
zum Zeitpunkt der ersten Messung an-
hand der Signal-Laufzeit nur näherungs-
weise bestimmt wird, kann ihr tatsäch-
licher Wert um etwa fünf bis zwanzig
Wellenlängen abweichen. Die Kunst be-
steht also darin, mittels statistischer Aus-
wertung einer möglichst großen Anzahl
von Messungen die Mehrdeutigkeit auf-
zulösen. Eine Möglichkeit der Kompen-
sation bietet längere Meßzeit auf einem
Standort bei gleichzeitiger Auswertung
mehrerer GPS-Signale: Man bestimmt
quasi die Position des Empfängers mit
verschiedenen Kombinationen von Satel-
liten und sucht Unterschiede der berech-
|
neten
Werte durch Variation der jewei-
ligen Mehrdeutigkeiten auszugleichen
(mathematisch gesprochen ergibt sich
ein überbestimmtes Gleichungssystem).
Deshalb haben die Empfänger die ge-
nannte hohe Anzahl von Kanälen, um
alle verfügbaren Signale auszumessen.
Allerdings bedarf es des kontinuierlichen
Kontakts zu den Satelliten, weil jede Un-
terbrechung erneute Mehrdeutigkeit be-
deutet.
Es
gibt noch eine Reihe weiterer Phä-
nomene, welche die Genauigkeit der
Messung beeinträchtigen. Die Ausbrei-
tungsgeschwindigkeit der Satellitensi-
gnale unterliegt auf dem langen Weg von
etwa 20000 Kilometern nacheinander
den Einflüssen der Ionosphäre mit ihrem
zeitlich stark schwankenden Elektronen-
gehalt und der Troposphäre mit einer
wetter- und höhenabhängigen Dichte.
Die physikalischen Zusammenhänge der
Signalveränderung sind zwar bekannt,
die Einflußgrößen aber nicht ohne weite-
res genügend genau bestimmbar. Der io-
nospärische Einfluß läßt sich aber ermit-
teln, indem man auf beiden Trägerfre-
quenzen mißt. Weil diese in der Iono-
sphäre unterschiedlich stark beschleunigt
werden, läßt sich die Störung aus der
Differenz der empfangenen Signale er-
mitteln. Zur Korrektur troposphärischer
Einflüsse haben sich Modellfunktionen
für Luftdruck und Temperatur bewährt,
die von der Höhe und der geographi-
schen Breite abhängig sind.
Die
Empfangseinheiten, bestehend
aus Empfänger und Antenne, arbeiten
ebenfalls nicht völlig fehlerfrei. Bei-
spielsweise treten Synchronisationsfeh-
ler auf, und die Antenne empfängt nicht
in allen Richtungen gleich. Indes wird
die Technik immer präziser, so daß diese
Effekte bald vernachlässigbar sein dürf-
ten. Allerdings verfälschen zudem Refle-
xionen der GPS-Signale in der Umge-
bung der Antenne die Messungen, wofür
es bislang noch keine Korrekturmöglich-
keiten gibt.
Praktische Anwendung
Der Geodät setzt
zumeist ein stati-
sches Verfahren ein, bei dem er je nach
Qualitätsansprüchen Minuten oder gar
Stunden auf einzelnen Punkten mißt. Da-
bei steht mindestens ein Empfänger auf
einem Punkt mit bekannten Koordinaten
und mindestens einer auf neu zu bestim-
menden.
Beim sogenannten Stop &
Go-Verfah-
ren hingegen, das wesentlich effektiver
ist, verweilt er nur wenige Sekunden auf
jedem Meßpunkt und geht zügig zum
|